Exploiting Scaling Constants to Facilitate the Convergence of Indirect Trajectory Optimization Methods
Overview
Indirect (Pontryagin-based) methods can be extremely efficient and accurate for low-thrust trajectory optimisation, but in practice they are often bottlenecked by convergence sensitivity to the initial costate guess and discontinuities in bang–bang structures.
This note proposes a practical continuation strategy that uses scaling constants to transition from an energy-optimal (EO) solution into fuel-optimal (FO) and time-optimal (TO) problems. The goal is to obtain a “good enough” path for the optimiser to converge quickly, even when perturbations and eclipses are present.
- • A simple EO→FO mapping via \(\beta_f\)
- • A simple EO→TO mapping via \(\beta_t\)
- • Fewer iterations / lower residuals in shooting solves
- • Demonstrations across heliocentric + geocentric cases
Method
1) Solve an Energy-Optimal (EO) problem as the “bridge”
The EO problem is typically smoother than FO/TO and is used to obtain a robust initial guess for costates. Conceptually:
The EO solution provides a stable starting point (state + costates + switching structure cues) to initialise harder problems.
2) EO → Fuel-Optimal (FO) using \(\beta_f\)
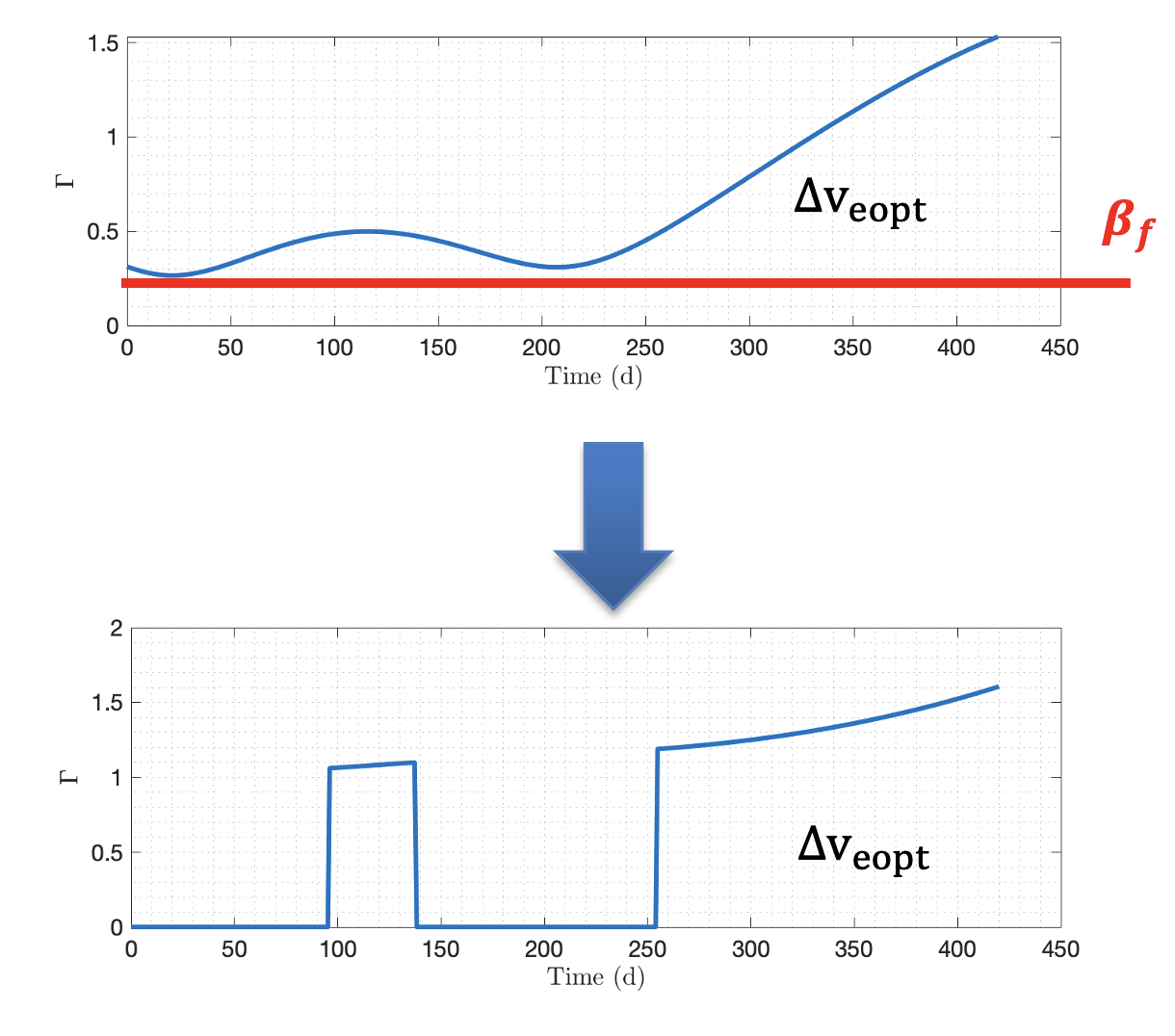
Fuel-optimal control tends toward bang–bang behaviour and can be difficult for indirect shooting methods without a good initialisation. Introduce a positive scaling constant \(\beta_f\) in the FO objective to promote a convenient thrust profile during the transition from EO:
In this work, \(\beta_f\) is selected from the EO solution (via the EO-derived switching structure) so the continuation lands in a region where the FO shooting method converges with fewer iterations.
3) EO → Time-Optimal (TO) using \(\beta_t\)
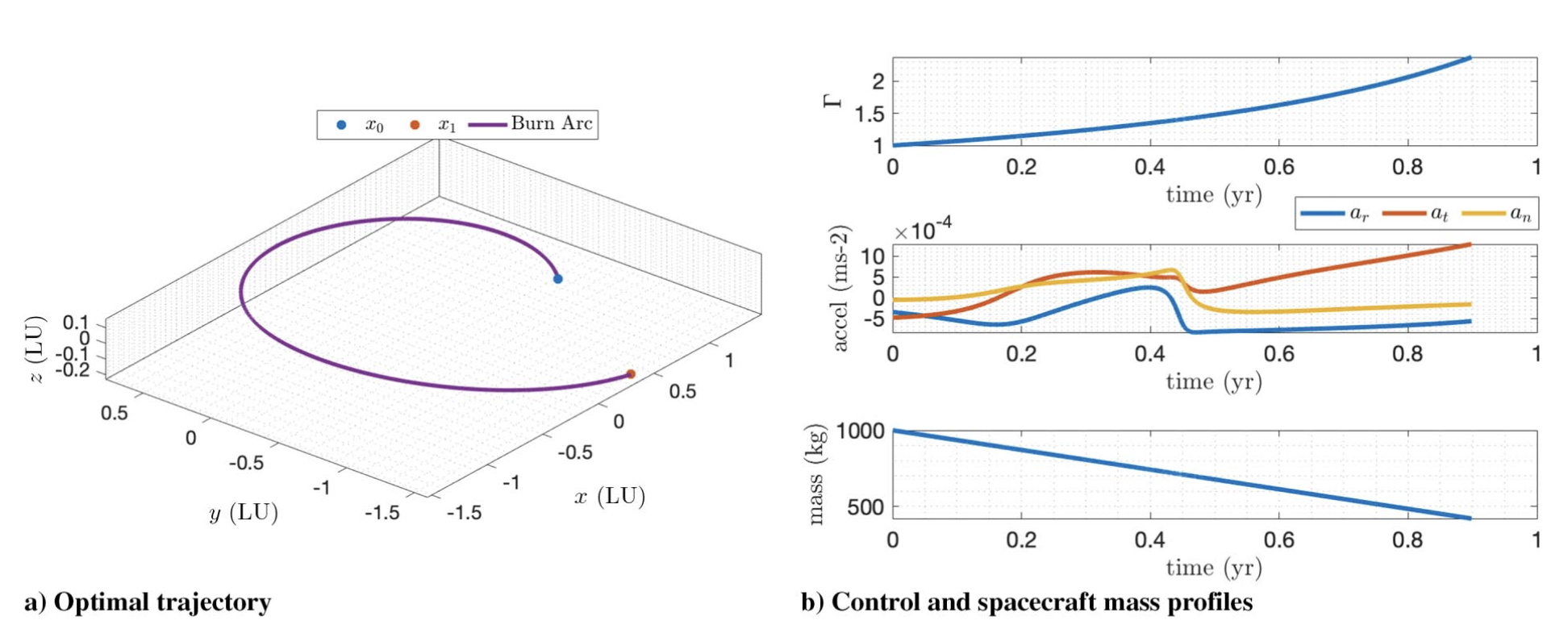
For time-optimal problems, an EO solve with a free final time can provide a strong initial guess for flight time and costates. A constant scaling factor \(\beta_t\) is used to reduce residuals and improve convergence:
This EO-initialised continuation can be applied with Keplerian dynamics, and extended to perturbations (e.g., \(J_2\)) and eclipses.
EO-derived switching structure
A practical reason the energy-optimal (EO) problem is a useful “bridge” is that it reveals a proxy switching structure that closely resembles the on/off pattern that appears in fuel-optimal (FO) and time-optimal (TO) solutions. We use this EO-derived structure to initialise the indirect shooting solve and to choose the scaling constants \( \beta_f \) and \( \beta_t \) so the continuation lands in a region where the solver converges reliably.
Key idea
From the EO solution, construct a “switching indicator” using the EO control magnitude (or an equivalent EO switching function proxy). A simple representation is:
\[ s_E(t) \;=\; \|\mathbf{u}_E(t)\| \quad \Rightarrow \quad \text{burn at } t \text{ if } s_E(t) \ge s_{\mathrm{th}}. \]This produces a time-partition (burn / coast arcs) that can be carried into FO/TO as an initial guess for the bang–bang pattern, including approximate arc boundaries.
In implementation, the EO-derived switching structure is used in two ways:
- Initialise switching times / arc partitioning for the FO/TO shooting solve, reducing sensitivity to the initial costate guess.
- Set continuation scaling so that the FO/TO costate magnitudes and the resulting switching function are well-conditioned during the transition (via \( \beta_f \) and \( \beta_t \)).
Implementation outline
EO to FO
- Solve EO to obtain state/costate trajectories and switching cues.
- Compute \(\beta_f\) from the EO solution, then solve FO using EO as the initial guess.
EO to TO
- Solve EO with free final time to seed TOF, compute \(\beta_t\), then solve TO.
- Optionally add \(J_2\) and eclipse modelling, keeping the continuation logic unchanged.
Results
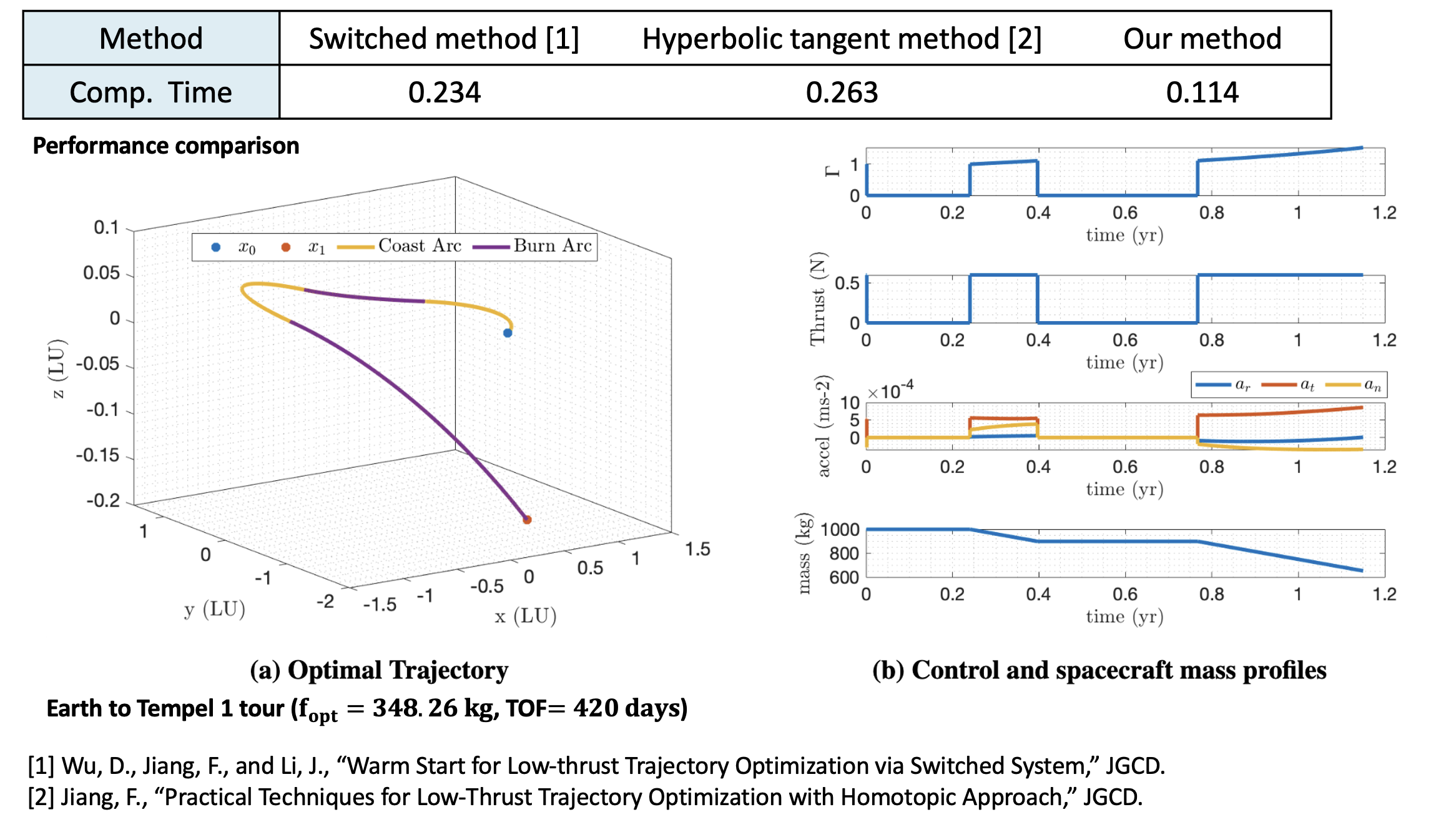
Headline takeaway: introducing \(\beta_f\) for FO and \(\beta_t\) for TO supports convergence and reduces practical tuning burden compared to “classical” indirect setups (e.g., default unity scaling).
| Mission | FO flight time (d) | FO fuel (kg) | FO compute (s) | \(\beta_f\) | TO flight time (d) | TO fuel (kg) | TO compute (s) | \(\beta_t\) |
|---|---|---|---|---|---|---|---|---|
| Earth → Tempel 1 | 420.00 | 348.26 | 0.114 | 0.4781 | 328.13 | 578.18 | 0.208 | 21.3486 |
| Earth → Dionysus | 3534.00 | 1280.70 | 0.425 | 0.5389 | 1848.89 | 1737.53 | 0.733 | 2.9195 |
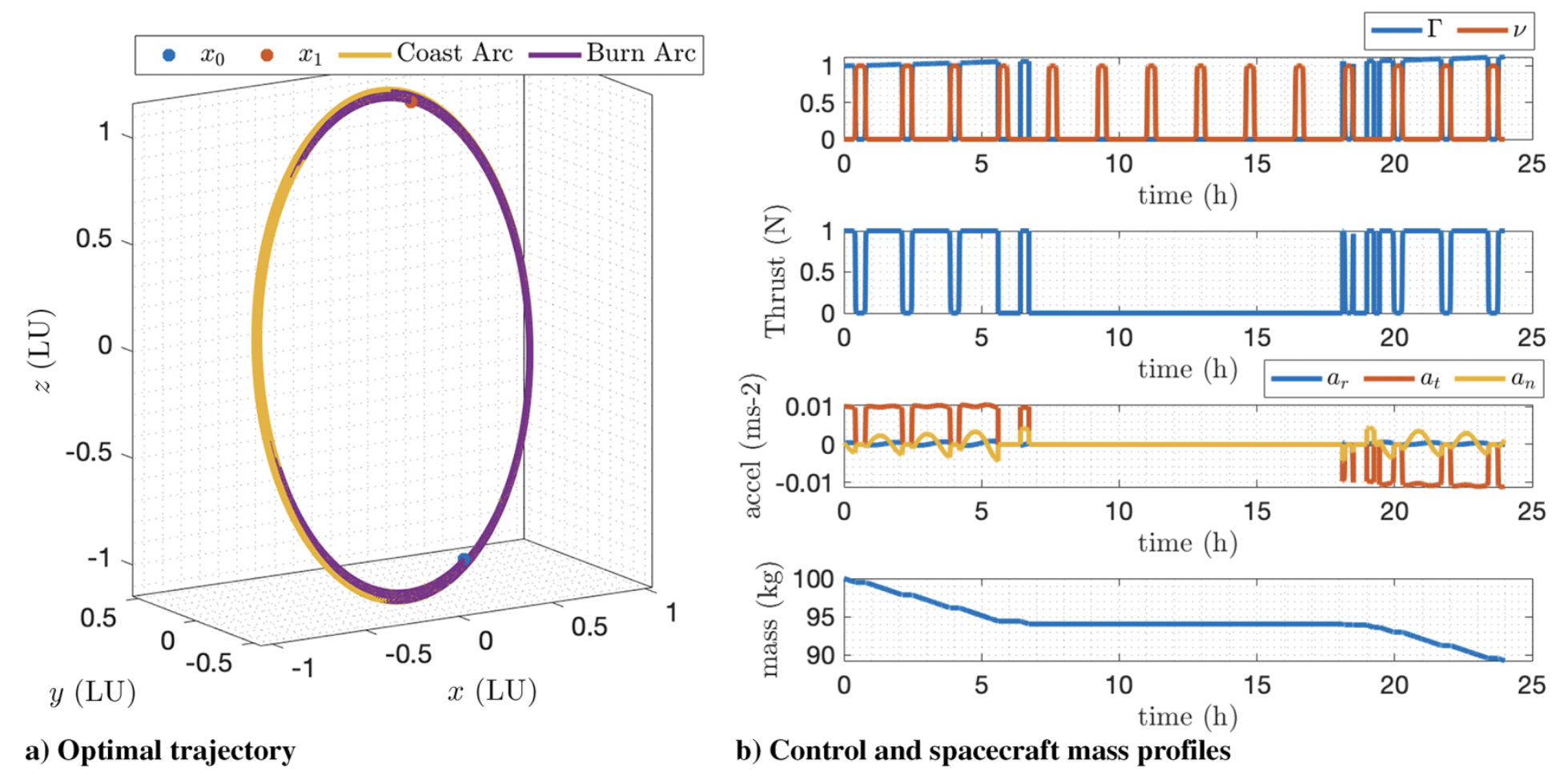
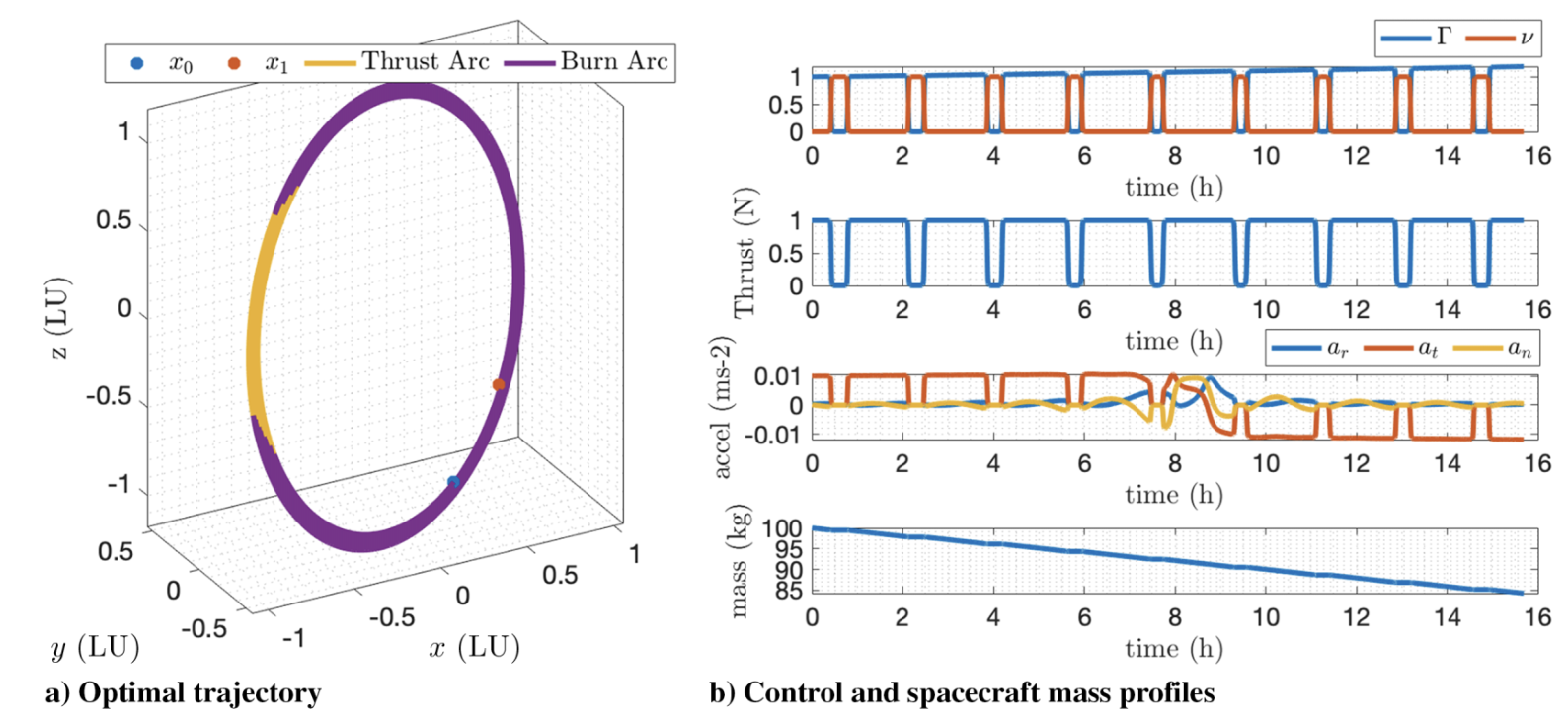
| Space debris (geocentric) | 1.00 | 11.09 | 75.600 | 0.4886 | 0.654 | 15.74 | 55.320 | 27.1080 |
- • \(\beta_f\) supports EO→FO continuation and helps reduce iterations to convergence.
- • \(\beta_t\) supports EO-initialised TO solves by reducing residuals / improving convergence behaviour.
- • Demonstrations include heliocentric transfers and a geocentric debris-to-debris case (with perturbations/eclipses variants discussed).
Cite this work
BibTeX
@article{Wijayatunga2023ScalingConstants,
title = {Exploiting Scaling Constants to Facilitate the Convergence of Indirect Trajectory Optimization Methods},
author = {Wijayatunga, Minduli C. and Armellin, Roberto and Pirovano, Laura},
journal = {Journal of Guidance, Control, and Dynamics},
volume = {46},
number = {5},
pages = {958--969},
year = {2023},
doi = {10.2514/1.G007091}
}If you prefer, swap the citation key or adjust page ranges to match your preferred bibliography format.