
Reinforcement Learning for Spacecraft Guidance
A robust guidance scheme for far-range rendezvous using RL with safety and observability considerations.
Learn more →Space for good
Developing intelligent, safe, and sustainable autonomous systems for space exploration, debris removal, and proximity operations at the University of Illinois Urbana-Champaign.

SSA Lab is an academic lab in the Grainger School of Engineering at UIUC. We focus primarily on solving the space debris problem by addressing critical challenges in missions with rendezvous and proximity operations.
Our work spans the entire lifecycle of in-orbit servicing missions — from preliminary trajectory design to real-time autonomous guidance during the final approach. We combine classical astrodynamics with modern AI techniques including reinforcement learning, control barrier functions, and convex optimization.
We collaborate with partners across academia and industry, including MIT, the Australian Centre for Field Robotics, Astroscale, and JPL, to push the boundaries of what's achievable in autonomous space operations.
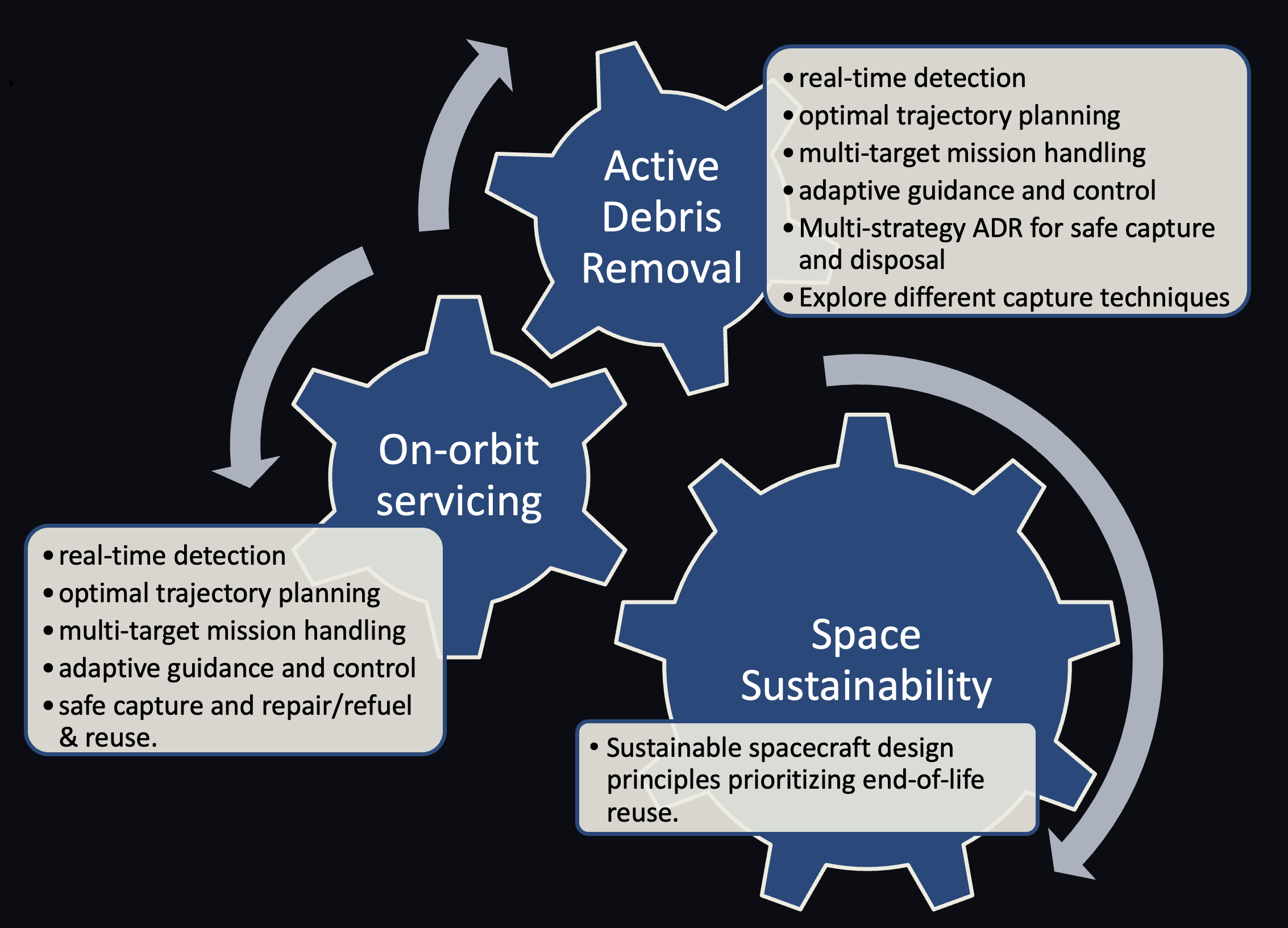
Real-time detection, optimal trajectory planning, multi-target missions, adaptive guidance, multi-strategy ADR for safe capture and disposal.
Real-time detection, trajectory planning, multi-target handling, adaptive guidance, safe capture and repair, refuel, and reuse.
Sustainable spacecraft design principles prioritizing end-of-life reuse and reducing the long-term debris footprint of space operations.
A framework learning the full hierarchy of class-K functions in ICCBFs via meta-RL for safer, more fuel-efficient RPO.
arXiv 2602.07335Two-stage RL framework addressing conservatism and recoverability of ICCBFs for safety-critical spacecraft control.
arXiv 2602.00366Minduli named to the Forbes 30 Under 30 list for 2026 for pioneering spacecraft autonomy and debris removal technology.
AwardFounding the Space Sustainability and Autonomy Lab in the Department of Aerospace Engineering at UIUC.
AppointmentCollaborating with Prof. Richard Linares on advanced autonomy and safety-critical guidance for spacecraft.
CollaborationOur paper on robust trajectory design using reinforcement learning with safety and observability considerations published in Aerospace Science & Technology.
PublicationAs part of TheAntipodes: 3rd place in GTOC11, 5th in GTOC12, and 3rd in GTOC13.
CompetitionTwo frameworks for autonomous in-orbit servicing accepted for conference presentation.
Publication
Interests: Rendezvous & Proximity Operations, Astrodynamics, Reinforcement Learning, Control Barrier Functions, Multi-Objective Trajectory Optimization, Model Predictive Control, Convex & Indirect Optimization

Chala is broadly interested in enabling safe autonomy and decision-making for physical systems such as spacecraft and robots that operate under uncertainty. He aims to develop principled frameworks using optimization, control theory, machine learning, and game theory to enable high-performing, safe autonomous systems.
Interests: Rendezvous & Proximity Operations, Safe Control, Multi-Agent Systems, Trajectory Optimization, Guidance, Navigation, and Control
Aakanksha is an independant study student working on trajectory optimization for Active Space Debris Removal.
Interests: Orbital Mechanics, Space Systems & Structures, Trajectory Optimization, Active Debris Removal
Trinith is interested in building intelligent, AI-powered applications that leverage the latest advances in machine learning and software systems. He aims to develop practical and impactful solutions using deep learning, computer vision, NLP, and reinforcement learning.
Interests: Natural Language Processing, Computer Vision, Reinforcement Learning, AI-Powered Application Development, Deep Learning, Software Systems
Yumeth is a 3rd year undergraduate studying Computer Science and Engineering. He is currently collaborating with Trinith on a project under the supervision of Prof. Minduli.
Interests: Computer Science & Engineering
A robust guidance scheme for far-range rendezvous using RL with safety and observability considerations.
Learn more →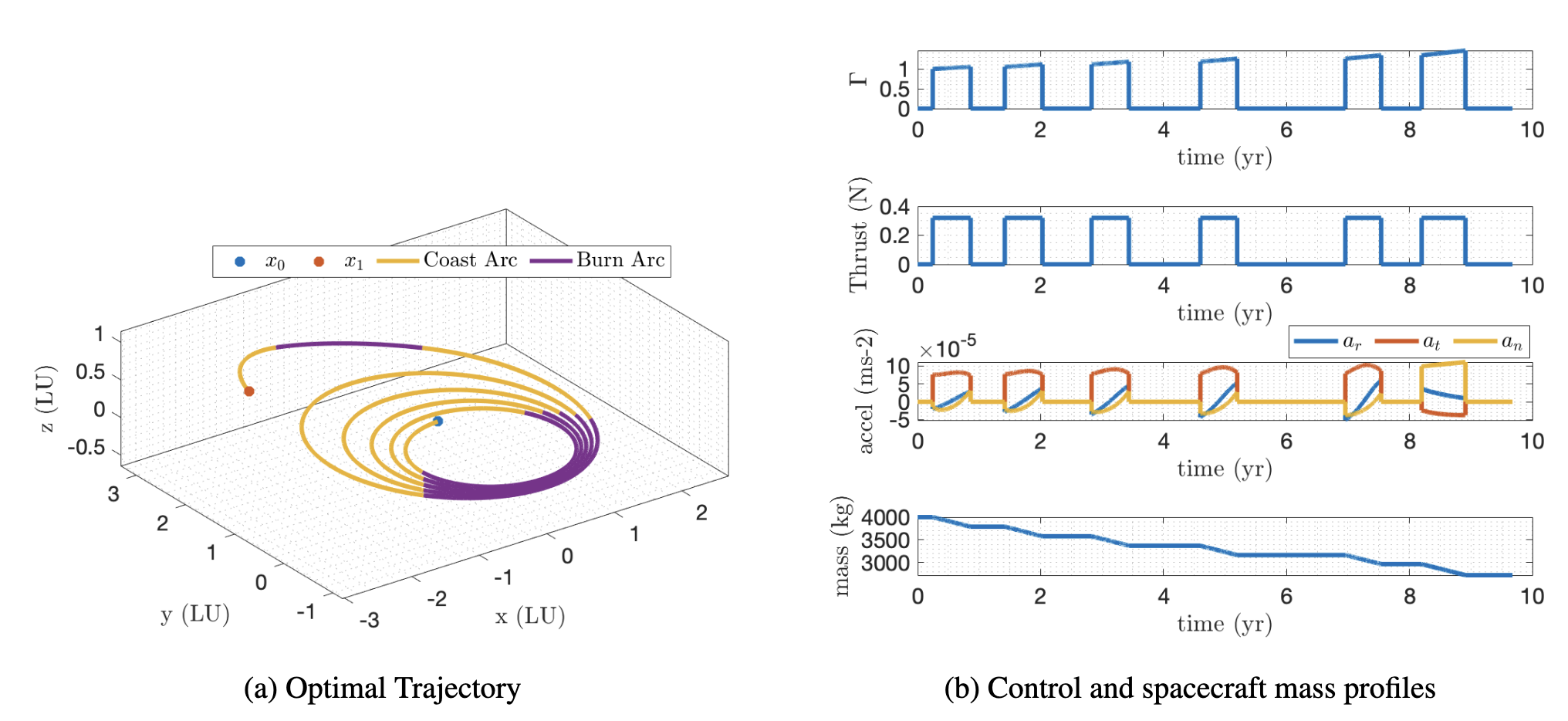
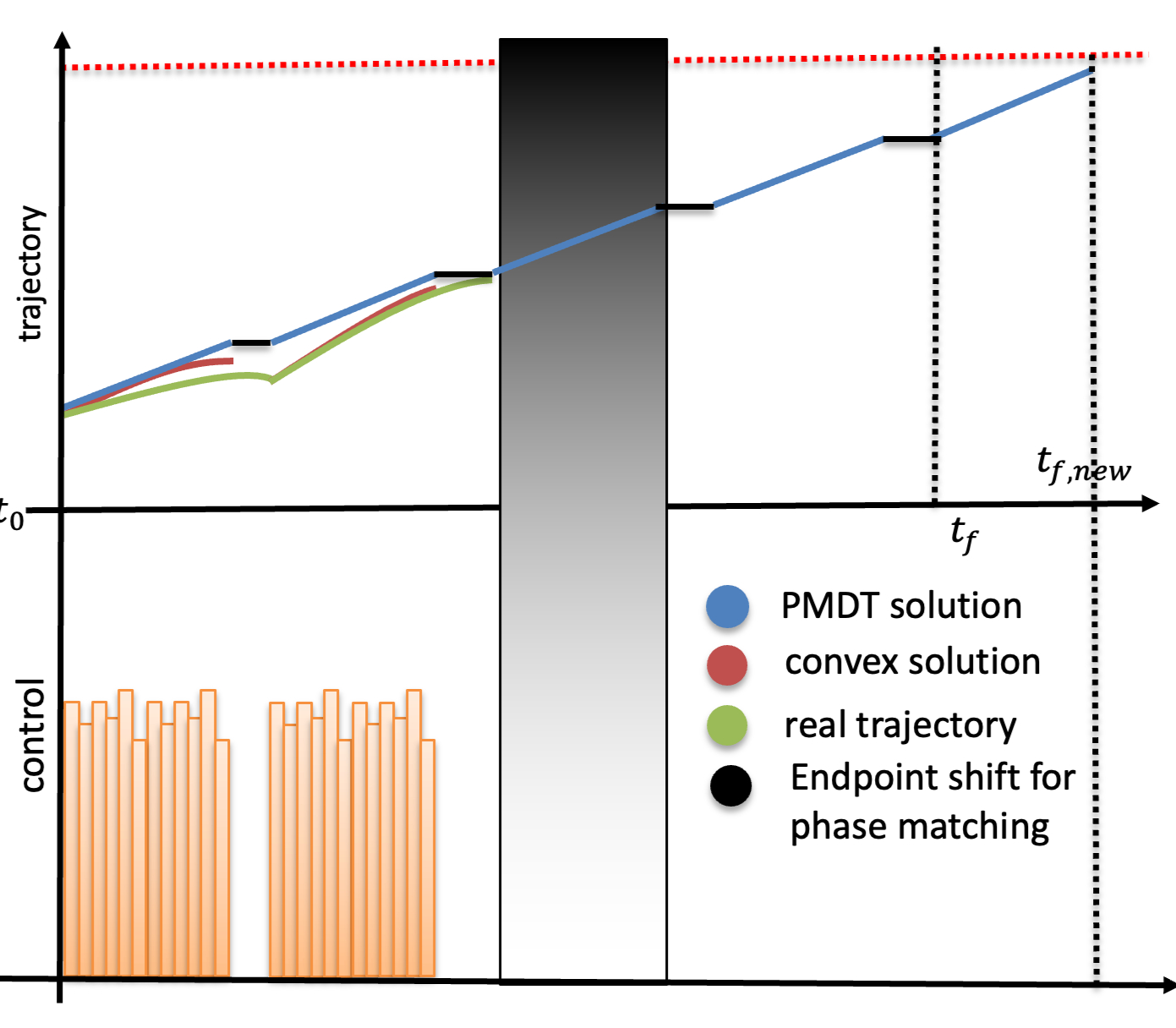
Scaling factors to connect energy-optimal to time-optimal and fuel-optimal problems for better convergence.
Learn more →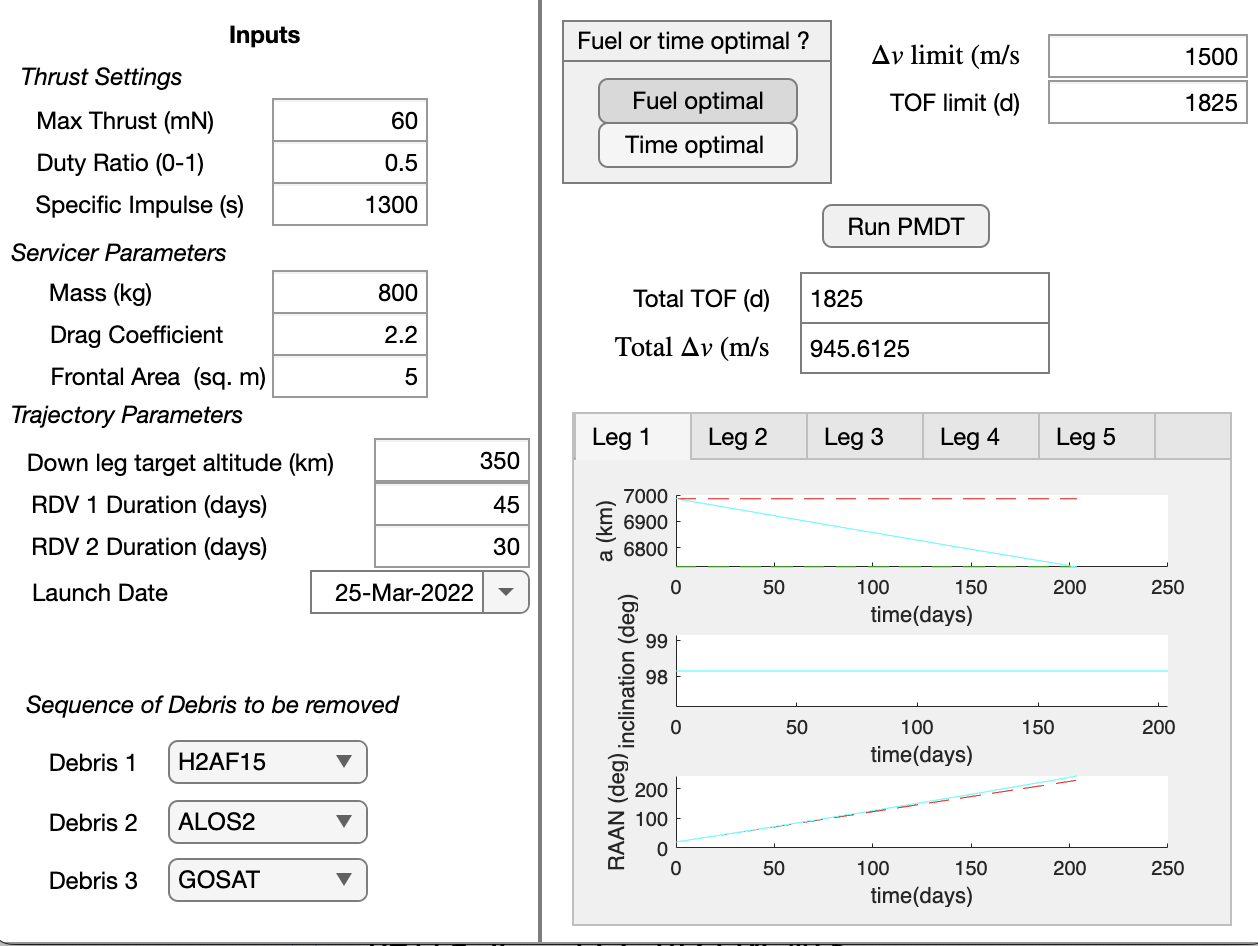
Generates multi-target, fuel- and time-optimal tours using low-thrust propulsion with J2, drag, eclipses, and duty cycles.
Learn more →
Team Antipodes — indirect and convex-based tools. GTOC11: 3rd, GTOC12: 5th, GTOC13: 3rd.
Convex-based MPC for low-thrust transfer trajectory guidance with real-time performance.
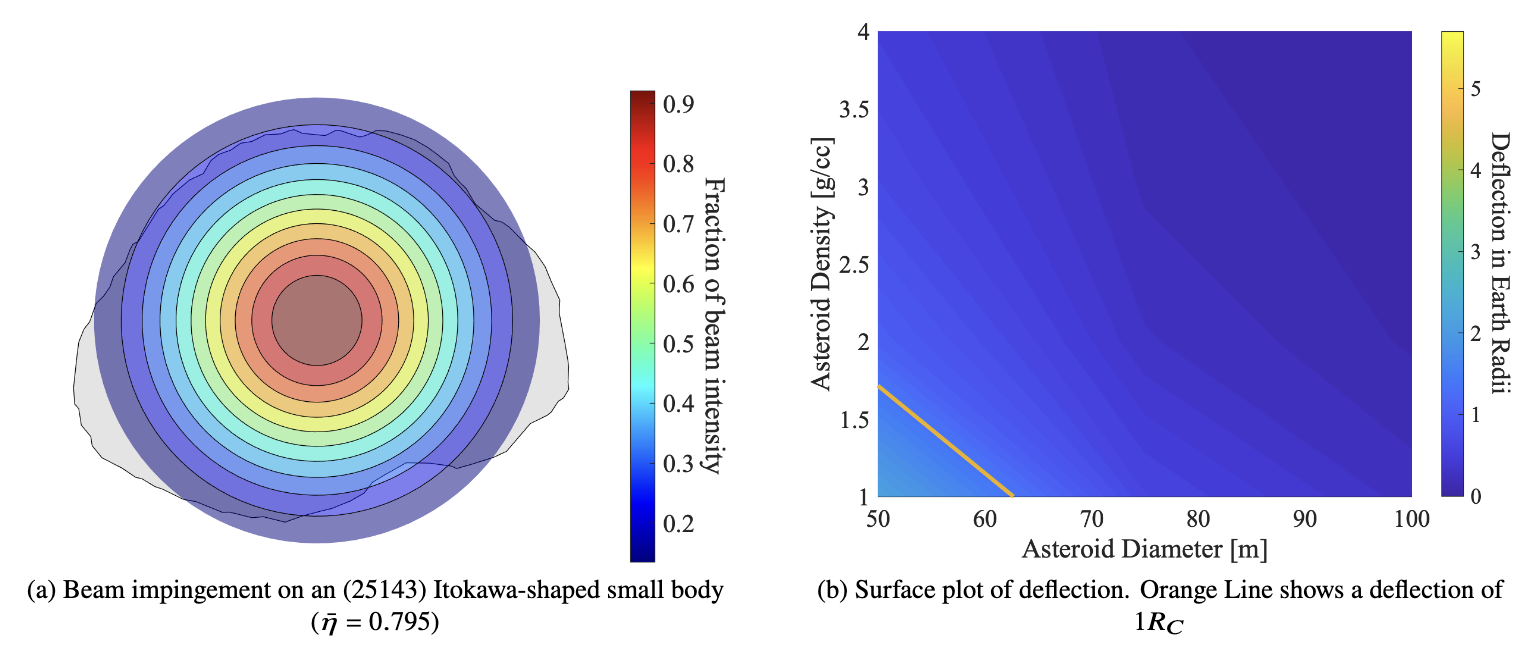
A framework assessing the feasibility of deflecting hazardous asteroids via ion beams for planetary defense.
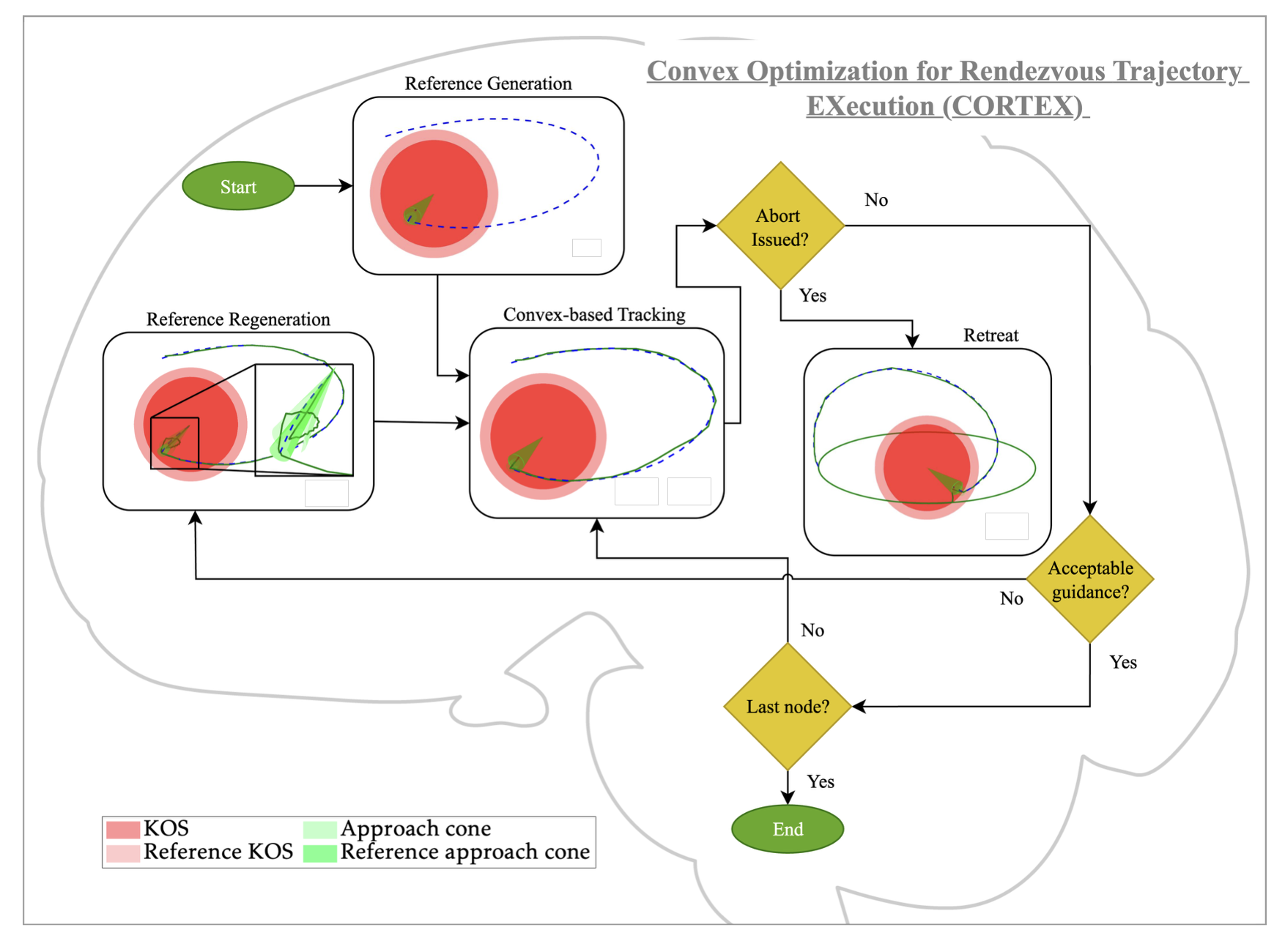
A sunlight-aware, robust convex-tracking scheme for final approach in RPO missions.

End-to-end transfer and guidance framework for spacecraft servicing missions.
Selected journal and conference papers.
I am currently looking for two PhD students to start in 2026. Please contact me if interested.
Research focused on RPO algorithms and hardware testing for in-orbit servicing and debris removal missions.
Astrodynamics background, previous publications, strong grades, some hardware experience.
Developing autonomous guidance and mission design tools for active debris removal campaigns.
Astrodynamics background, previous publications, strong grades, interest in debris removal.